3
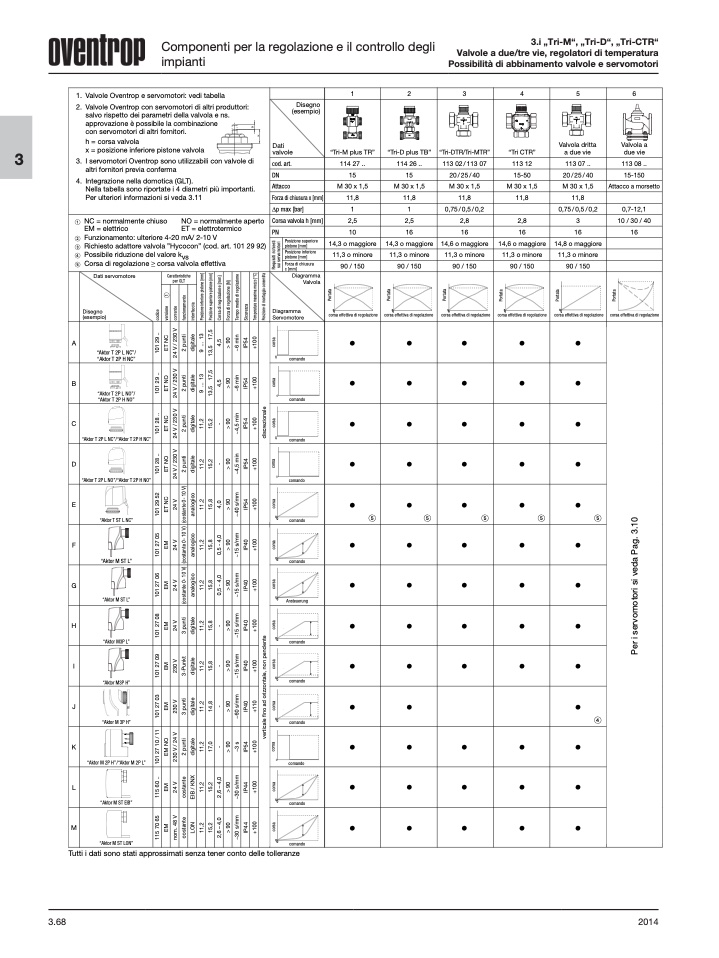
3. I servomotori Oventrop sono utilizzabili con valvole di
altri fornitori previa conferma
4. Integrazione nella domotica (GLT).
Nella tabella sono riportate i 4 diametri più importanti.
Per ulteriori informazioni si veda 3.11
“Tri-M plus TR”
114 27 ..
“Tri-D plus TB”
114 26 ..
“Tri-DTR/Tri-MTR”
113 02/113 07
“Tri CTR”
113 12
Valvola dritta
a due vie
M 30 x 1,5
11,8
0,75/0,5/0,2
3
Valvola a
due vie
Attacco a morsetto
3.68
2014
A
B
C
D
E
F
G
H
I
J
K
L
M
NC = normalmente chiuso
NO = normalmente aperto
EM = elettrico
ET = elettrotermico
Funzionamento: ulteriore 4-20 mA/ 2-10 V
Richiesto adattore valvola ”Hycocon” (cod. art. 101 29 92)
Possibile riduzione del valore k
2,8
10
16
16
16
16
16
vs
Corsa di regolazione ≥ corsa valvola effettiva
14,3 o maggiore
11,3 o minore
90 / 150
corsa effettiva di regolazione
14,3 o maggiore
11,3 o minore
90 / 150
corsa effettiva di regolazione
14,6 o maggiore
11,3 o minore
90 / 150
corsa effettiva di regolazione
14,6 o maggiore
11,3 o minore
90 / 150
corsa effettiva di regolazione
14,8 o maggiore
11,3 o minore
90 / 150
corsa effettiva di regolazione
Dati servomotore
Disegno
(esempio)
“Aktor T 2P L NC”/
“Aktor T 2P H NC”
“Aktor T 2P L NO”/
“Aktor T 2P H NO”
“Aktor T 2P L NC”/“Aktor T 2P H NC”
“Aktor T 2P L NO”/“Aktor T 2P H NO”
“Aktor T ST L NC”
“Aktor M ST L”
“Aktor M ST L”
“Aktor M3P L”
“Aktor M3P H”
“Aktor M 3P H”
“Aktor M 2P H”/“Aktor M 2P L”
“Aktor M ST EIB”
“Aktor M ST LON”
Caratteristiche
perGLT
Componenti per la regolazione e il controllo degli
impianti
3.i „Tri-M“, „Tri-D“, „Tri-CTR“
Valvole a due/tre vie, regolatori di temperatura
Possibilità di abbinamento valvole e servomotori
1. Valvole Oventrop e servomotori: vedi tabella
2. Valvole Oventrop con servomotori di altri produttori:
salvo rispetto dei parametri della valvola e ns.
approvazione è possibile la combinazione
con servomotori di altri fornitori.
h = corsa valvola
x = posizione inferiore pistone valvola
1
2
3
4
5
6
Tutti i dati sono stati approssimati senza tener conto delle tolleranze
Disegno
(esempio)
Dati
valvole
cod.art.
DN
15
15
20/25/40
15-50
20/25/40
15-150
Attacco
Forza di chiusura x [mm]
∆p max [bar]
Corsa valvola h [mm]
PN
Posizione superiore
pistone [mm]
Posizione inferiore
pistone [mm]
Forza di chiusura
c [mm]
Diagramma
Valvola
Diagramma
Servomotore
comando
comando
comando
comando
comando
comando
Ansteuerung
comando
comando
comando
comando
comando
comando
M 30 x 1,5
11,8
1
2,5
M 30 x 1,5
11,8
1
2,5
M 30 x 1,5
11,8
0,75/0,5/0,2
2,8
M 30 x 1,5
11,8
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
113 07 ..
113 08 ..
0,7-12,1
10 / 30 / 40
corsa effettiva di regolazione
1
1
5
7
0
6
5
E
M
n
o
m
.
4
8
V
c
o
s
t
a
n
t
e
L
O
N
1
1
,
2
1
5
,
2
2
,
6
–
4
,
0
>
9
0
~
3
0
s
/
m
m
1
1
5
6
0
.
.
E
M
2
4
V
c
o
s
t
a
n
t
e
E
I
B
/
K
N
X
1
1
,
2
1
5
,
2
2
,
6
–
4
,
0
>
9
0
~
3
0
s
/
m
m
1
0
1
2
7
1
0
/
1
1
E
M
N
O
2
3
0
V
/
2
4
V
2
p
u
n
t
i
d
i
g
i
t
a
l
e
1
1
,
2
1
7
,
0
-
>
9
0
~
3
s
I
P
5
4
1
0
1
2
7
0
3
E
M
2
3
0
V
3
p
u
n
t
i
d
i
g
i
t
a
l
e
1
1
,
2
1
4
,
8
-
>
9
0
~
6
0
s
/
m
m
1
0
1
2
7
0
6
E
M
2
4
V
1
0
1
2
9
5
2
E
T
N
C
2
4
V
c
o
d
i
c
e
v
e
r
s
i
o
n
e
c
o
r
r
e
n
t
e
f
u
n
z
i
o
n
a
m
e
n
t
o
i
n
t
e
r
f
a
c
c
i
a
P
o
s
i
z
i
o
n
e
i
n
f
e
r
i
o
r
e
p
i
s
t
o
n
e
[
m
m
]
P
o
s
i
z
i
o
n
e
s
u
p
e
r
i
o
r
e
p
i
s
t
o
n
e
[
m
m
]
C
o
r
s
a
d
i
r
e
g
o
l
a
z
i
o
n
e
[
m
m
]
F
o
r
z
a
d
i
r
e
g
o
l
a
z
i
o
n
e
[
N
]
T
e
m
p
o
m
e
d
i
o
d
i
r
e
g
o
l
a
z
i
o
n
e
S
i
c
u
r
e
z
z
a
T
e
m
p
e
r
a
t
u
r
a
m
a
s
s
i
m
a
m
e
z
z
o
[
°
C
]
P
o
s
i
z
i
o
n
e
d
i
m
o
n
t
a
g
g
i
o
c
o
n
s
e
n
t
i
t
a
1
0
1
2
7
0
9
E
M
2
3
0
V
3
-
P
u
n
k
t
d
i
g
i
t
a
l
e
1
1
,
2
1
5
,
8
-
>
9
0
~
1
5
s
/
m
m
1
0
1
2
7
0
8
E
M
2
4
V
3
p
u
n
t
i
d
i
g
i
t
a
l
e
1
1
,
2
1
5
,
8
-
>
9
0
~
1
5
s
/
m
m
1
0
1
2
7
0
5
E
M
2
4
V
(
c
o
s
t
a
n
t
e
0
-
1
0
V
)
(
c
o
s
t
a
n
t
e
0
-
1
0
V
)
(
c
o
s
t
a
n
t
e
0
-
1
0
V
)
1
0
1
2
8
.
.
E
T
N
O
2
4
V
/
2
3
0
V
2
p
u
n
t
i
d
i
g
i
t
a
l
e
1
1
,
2
1
5
,
2
-
>
9
0
~
4
,
5
m
i
n
1
0
1
2
8
.
.
E
T
N
C
2
4
V
/
2
3
0
V
2
p
u
n
t
i
d
i
g
i
t
a
l
e
1
1
,
2
1
5
,
2
-
>
9
0
~
4
,
5
m
i
n
1
0
1
2
9
.
.
E
T
N
O
2
4
V
/
2
3
0
V
2
p
u
n
t
i
d
i
g
i
t
a
l
e
9
.
.
.
1
3
1
3
,
5
1
7
,
5
4
,
5
>
9
0
~
6
m
i
n
1
0
1
2
9
.
.
E
T
N
C
2
4
V
/
2
3
0
V
2
p
u
n
t
i
d
i
g
i
t
a
l
e
9
.
.
.
1
3
1
3
,
5
1
7
,
5
4
,
5
>
9
0
~
6
m
i
n
a
n
a
l
o
g
i
c
o
1
1
,
2
1
5
,
8
0
,
5
-
4
,
0
>
9
0
~
1
5
s
/
m
m
a
n
a
l
o
g
i
c
o
1
1
,
2
1
5
,
8
0
,
5
-
4
,
0
>
9
0
~
1
5
s
/
m
m
a
n
a
l
o
g
i
c
o
1
1
,
2
1
5
,
8
4
,
0
>
9
0
~
4
0
s
/
m
m
I
P
4
0
I
P
4
0
I
P
4
0
I
P
4
0
I
P
4
0
I
P
5
4
I
P
5
4
I
P
5
4
I
P
5
4
I
P
5
4
+
1
0
0
+
1
0
0
+
1
0
0
+
1
1
0
+
1
0
0
+
1
0
0
+
1
0
0
+
1
0
0
+
1
0
0
+
1
0
0
+
1
0
0
+
1
0
0
+
1
0
0
I
P
4
4
I
P
4
4
v
e
r
t
i
c
a
l
e
f
i
n
o
a
d
o
r
i
z
z
o
n
t
a
l
e
,
n
o
n
p
e
n
d
e
n
t
e
d
i
s
c
r
e
z
i
o
n
a
l
e
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
c
o
r
s
a
R
e
q
u
i
s
i
t
i
r
i
c
h
i
e
s
t
i
s
u
i
s
e
r
v
o
m
o
t
o
r
i
P
e
r
i
s
e
r
v
o
m
o
t
o
r
i
s
i
v
e
d
a
P
a
g
.
3
.
1
0
P
o
r
t
a
t
a
P
o
r
t
a
t
a
P
o
r
t
a
t
a
P
o
r
t
a
t
a
P
o
r
t
a
t
a
P
o
r
t
a
t
a

